The Sphere Calculator contains equations for volumes, surface areas,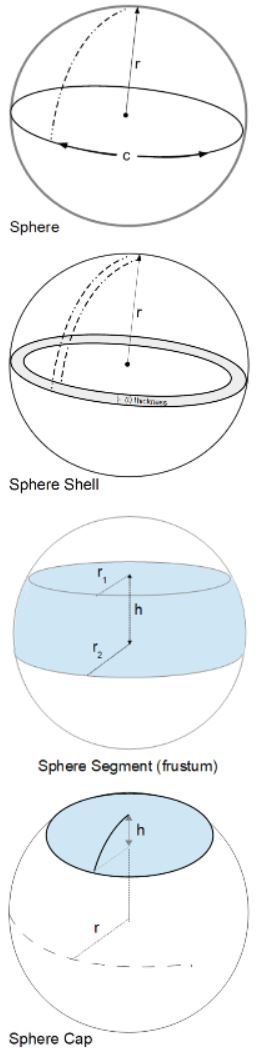 and moments of inertia for objects shaped like a geometric sphere. The user can enter basic dimensions and the calculator returns the values. Note, different units are available for input and outputs of the equations.
and moments of inertia for objects shaped like a geometric sphere. The user can enter basic dimensions and the calculator returns the values. Note, different units are available for input and outputs of the equations.
- Sphere Surface Area based radius (r)
- Sphere Volume based radius (r)
- Sphere Weight (Mass) based on volume and mean density (mD)
- Sphere Cap Surface Area
- Sphere Cap Volume
- Sphere Cap Weight (Mass)
- Sphere Segment Volume
- Sphere Segment Weight (Mass)
- Sphere Segment Wall Surface Area (without the circular top and bottom ends)
- Sphere Segment Full Surface Area (with the top and bottom circles, aka ends).
- moment of inertia of a spherical shaped object based around the central axis (diameter)
- moment of inertia of a spherical shaped object based around the edge of the sphere
- Volume of Spherical Shell
- Mass of Spherical Shell
- mean density of common substances (useful in calculating the mass/weight and the moments of inertia)
The Sphere
A sphere (from Greek — sphaira, "globe, ball") is a perfectly round geometrical and circular object in three-dimensional space that resembles the shape of a completely round ball. Like a circle, which, in geometric contexts, is in two dimensions, a sphere is defined mathematically as the set of points that are all the same distance r from a given point in three-dimensional space. This distance r is the radius of the sphere, and the given point is the center of the sphere. The maximum straight distance through the sphere passes through the center and is thus twice the radius; it is the diameter.
In mathematics, a distinction is made between the sphere (a two-dimensional closed surface embedded in three-dimensional Euclidean space) and the ball (a three-dimensional shape that includes the interior of a sphere).
Terminology
Pairs of points on a sphere that lie on a straight line through the sphere's center are called antipodal points. A great circle is a circle on the sphere that has the same center and radius as the sphere and consequently divides it into two equal parts. The shortest distance along the surface between two distinct non-antipodal points on the surface is on the unique great circle that includes the two points. Equipped with the great-circle distance, a great circle becomes the Riemannian circle.
If a particular point on a sphere is (arbitrarily) designated as its north pole, then the corresponding antipodal point is called the south pole, and the equator is the great circle that is equidistant to them. Great circles through the two poles are called lines (or meridians) of longitude, and the line connecting the two poles is called the axis of rotation. Circles on the sphere that are parallel to the equator are lines of latitude. This terminology is also used for such approximately spheroidal astronomical bodies as the planet Earth.
Hemispheres
Any plane that includes the center of a sphere divides it into two equal hemispheres. Any two intersecting planes that include the center of a sphere subdivide the sphere into four lunes or biangles, the vertices of which all coincide with the antipodal points lying on the line of intersection of the planes.
The antipodal quotient of the sphere is the surface called the real projective plane, which can also be thought of as the northern hemisphere with antipodal points of the equator identified.
The round hemisphere is conjectured to be the optimal (least area) filling of the Riemannian circle.
The circles of intersection of any plane not intersecting the sphere's center and the sphere's surface are called spheric sections
Eleven Properties of a sphere
In their book Geometry and the imagination1 David Hilbert and Stephan Cohn-Vossen describe eleven properties of the sphere and discuss whether these properties uniquely determine the sphere. Several properties hold for the plane, which can be thought of as a sphere with infinite radius. These properties are:
- The points on the sphere are all the same distance from a fixed point. Also, the ratio of the distance of its points from two fixed points is constant.
The first part is the usual definition of the sphere and determines it uniquely. The second part can be easily deduced and follows a similar result of Apollonius of Perga for the circle. This second part also holds for the plane.
- The contours and plane sections of the sphere are circles.
This property defines the sphere uniquely.
- The sphere has constant width and constant girth.
The width of a surface is the distance between pairs of parallel tangent planes. Numerous other closed convex surfaces have constant width, for example the Meissner body. The girth of a surface is the circumference of the boundary of its orthogonal projection on to a plane. Each of these properties implies the other.
- All points of a sphere are umbilics.
At any point on a surface a normal direction is at right angles to the surface because the sphere these are the lines radiating out from the center of the sphere. The intersection of a plane that contains the normal with the surface will form a curve that is called a normal section, and the curvature of this curve is the normal curvature. For most points on most surfaces, different sections will have different curvatures; the maximum and minimum values of these are called the principal curvatures. Any closed surface will have at least four points called umbilical points. At an umbilic all the sectional curvatures are equal; in particular the principal curvatures are equal. Umbilical points can be thought of as the points where the surface is closely approximated by a sphere.
For the sphere the curvatures of all normal sections are equal, so every point is an umbilic. The sphere and plane are the only surfaces with this property.
- The sphere does not have a surface of centers.
For a given normal section exists a circle of curvature that equals the sectional curvature, is tangent to the surface, and the center lines of which lie along on the normal line. For example, the two centers corresponding to the maximum and minimum sectional curvatures are called the focal points, and the set of all such centers forms the focal surface.
For most surfaces the focal surface forms two sheets that are each a surface and meet at umbilical points. Several cases are special:
- For channel surfaces one sheet forms a curve and the other sheet is a surface
- For cones, cylinders, tori and cyclides both sheets form curves.
- For the sphere the center of every osculating circle is at the center of the sphere and the focal surface forms a single point. This property is unique to the sphere.
- All geodesics of the sphere are closed curves.
Geodesics are curves on a surface that give the shortest distance between two points. They are a generalization of the concept of a straight line in the plane. For the sphere the geodesics are great circles. Many other surfaces share this property.
- Of all the solids having a given volume, the sphere is the one with the smallest surface area; of all solids having a given surface area, the sphere is the one having the greatest volume.
It follows from isoperimetric inequality. These properties define the sphere uniquely and can be seen in soap bubbles: a soap bubble will enclose a fixed volume, and surface tension minimizes its surface area for that volume. A freely floating soap bubble therefore approximates a sphere (though such external forces as gravity will slightly distort the bubble's shape).
- The sphere has the smallest total mean curvature among all convex solids with a given surface area.
The mean curvature is the average of the two principal curvatures, which is constant because the two principal curvatures are constant at all points of the sphere.
- The sphere has constant mean curvature.
The sphere is the only imbedded surface that lacks boundary or singularities with constant positive mean curvature. Other such immersed surfaces as minimal surfaces have constant mean curvature.
- The sphere has constant positive Gaussian curvature.
Gaussian curvature is the product of the two principal curvatures. It is an intrinsic property that can be determined by measuring length and angles and is independent of how the surface is embedded in space. Hence, bending a surface will not alter the Gaussian curvature, and other surfaces with constant positive Gaussian curvature can be obtained by cutting a small slit in the sphere and bending it. All these other surfaces would have boundaries, and the sphere is the only surface that lacks a boundary with constant, positive Gaussian curvature. The pseudosphere is an example of a surface with constant negative Gaussian curvature.
- The sphere is transformed into itself by a three-parameter family of rigid motions.
Rotating around any axis a unit sphere at the origin will map the sphere onto itself. Any rotation about a line through the origin can be expressed as a combination of rotations around the three-coordinate axis (see Euler angles). Therefore a three-parameter family of rotations exists such that each rotation transforms the sphere onto itself; this family is the rotation group SO(3). The plane is the only other surface with a three-parameter family of transformations (translations along the x and y axis and rotations around the origin). Circular cylinders are the only surfaces with two-parameter families of rigid motions and the surfaces of revolution and helicoids are the only surfaces with a one-parameter family.
See Also
- Geometry (3D) - Calculator associated with various shapes in three dimensions.
- Mass / Weight - Calculator with formulas for the mass and weight of various 3D objects
- Moments of Inertia - Calculator with formulas for the moments of inertia for different objects about different axes
- Haversine - Great circle arc distance equation between points on a sphere
- Cone Calculator - Equations related to conic shaped objects.
- Cylinder Calculator - Equations for cylinders
- Sphere Calculator - Equations related to spheres.
- Circle Calculator - Equations related to circles
- Ellipse Calculator - Equations related to ellipses
- Frustum - Equations related to the frustums of various objects
Sphere Calculators:
- Sphere Surface Area from Radius
- Sphere Surface Area from Volume
- Sphere Volume from Radius
- Sphere Volume from Circumference
- Sphere Volume from Surface Area
- Sphere Volume from Mass and Density
- Sphere Radius from Volume
- Sphere Radius from Surface Area
- Sphere Weight (Mass) from volume and density
- Sphere Density
- Area of Triangle on a Sphere
- Distance between Two Points on a Sphere
- Sphere Cap Surface Area
- Sphere Cap Volume
- Sphere Cap Weight (Mass)
- Sphere Segment Volume
- Sphere Segment Weight (Mass)
- Sphere Segment Wall Surface Area (without the circular top and bottom ends)
- Sphere Segment Full Surface Area (with the top and bottom circles, aka ends)
- Volume of Spherical Shell
- Mass of Spherical Shell
Sources
- Wikipedia - http://en.wikipedia.org/wiki/Sphere
- ^ Hilbert, David; Cohn-Vossen, Stephan (1952). Geometry and the Imagination (2nd ed.). Chelsea. ISBN 0-8284-1087-9.