14.5 Momentum in three dimensions by Benjamin Crowell, Light and Matter licensed under the Creative Commons Attribution-ShareAlike license.
14.5 Momentum in three dimensions
In this section we discuss how the concepts applied previously to one-dimensional situations can be used as well in three dimensions. Often vector addition is all that is needed to solve a problem:
Example 17: An explosion
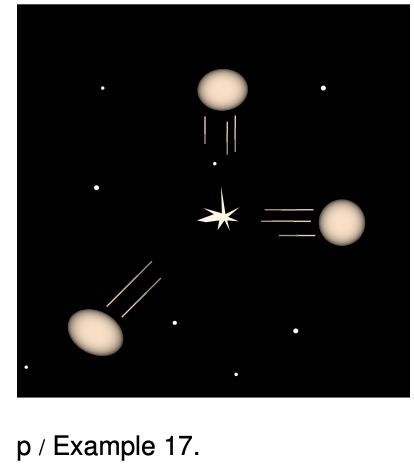 `=>` Astronomers observe the planet Mars as the Martians fight a nuclear war. The Martian bombs are so powerful that they rip the planet into three separate pieces of liquified rock, all having the same mass. If one fragment flies off with velocity components
`=>` Astronomers observe the planet Mars as the Martians fight a nuclear war. The Martian bombs are so powerful that they rip the planet into three separate pieces of liquified rock, all having the same mass. If one fragment flies off with velocity components
`v_"1x"=0`
`v_"1y"=1.0×10^4 km"/"hr `,
and the second with
`v_"2x"=1.0×10^4 km"/"hr `,
`v_"2y"=0.`
(all in the center of mass frame) what is the magnitude of the third one's velocity?
`=>` In the center of mass frame, the planet initially had zero momentum. After the explosion, the vector sum of the momenta must still be zero. Vector addition can be done by adding components, so
`mv_"1x"+mv_"2x"+mv_"3x"=0, and `
`mv_"1y"+mv_"2y"+mv_"3y"=0,`
where we have used the same symbol `m`, and we find
`v_"3x"=-1.0×10^4 km"/"hr `
`v_"3y"=-1.0×10^4 km"/"hr`
which gives a magnitude of
`|v_3|=sqrt(v_"3x"^2+v_"3y"^2)`
`=1.4×10^4 km"/"hr`
The center of mass
In three dimensions, we have the vector equations
`F_"total"=(Deltap_"total")/(Deltat)`
`and p_"total"=m_"total"v_"cm"`.
The following is an example of their use.
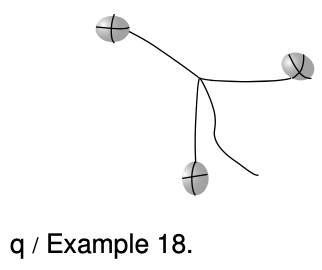
Example 18: The bola
The bola, similar to the North American lasso, is used by South American gauchos to catch small animals by tangling up their legs in the three leather thongs. The motion of the whirling bola through the air is extremely complicated, and would be a challenge to analyze mathematically. The motion of its center of mass, however, is much simpler. The only forces on it are gravitational, so
`F_"total"=m_"total"g.`
Using the equation `F_"total"=Deltap_"total""/"Deltat`, we find
`Deltap_"total" "/"Deltat =m_"total"g`,
and since the mass is constant, the equation `p_"total"=m_"total"v_"cm"` allows us to change this to
`m_"total"Deltav_(cm)"/"Deltat=m_"total"g.`
The mass cancels, and `Deltav_(cm)"/"Deltat` is simply the acceleration of the center of mass, so
`a_"cm"=g`.
In other words, the motion of the system is the same as if all its mass was concentrated at and moving with the center of mass. The bola has a constant downward acceleration equal to `g`, and flies along the same parabola as any other projectile thrown with the same initial center of mass velocity. Throwing a bola with the correct rotation is presumably a difficult skill, but making it hit its target is no harder than it is with a ball or a single rock.
[Based on an example by Kleppner and Kolenkow.]
Counting equations and unknowns
 Counting equations and unknowns is just as useful as in one dimension, but every object's momentum vector has three components, so an unknown momentum vector counts as three unknowns. Conservation of momentum is a single vector equation, but it says that all three components of the total momentum vector stay constant, so we count it as three equations. Of course if the motion happens to be confined to two dimensions, then we need only count vectors as having two components.
Counting equations and unknowns is just as useful as in one dimension, but every object's momentum vector has three components, so an unknown momentum vector counts as three unknowns. Conservation of momentum is a single vector equation, but it says that all three components of the total momentum vector stay constant, so we count it as three equations. Of course if the motion happens to be confined to two dimensions, then we need only count vectors as having two components.
Example 19: A two-car crash with sticking
Suppose two cars collide, stick together, and skid off together. If we know the cars' initial momentum vectors, we can count equations and unknowns as follows:
unknown #1: `x` component of cars' final, total momentum
unknown #2: `y` component of cars' final, total momentum
equation #1: conservation of the total `p_x`
equation #2: conservation of the total `p_y`
Since the number of equations equals the number of unknowns, there must be one unique solution for their total momentum vector after the crash. In other words, the speed and direction at which their common center of mass moves off together is unaffected by factors such as whether the cars collide center-to-center or catch each other a little off-center.
Example 20: Shooting pool
Two pool balls collide, and as before we assume there is no decrease in the total kinetic energy, i.e., no energy converted from KE into other forms. As in the previous example, we assume we are given the initial velocities and want to find the final velocities. The equations and unknowns are:
unknown #1: `x` component of ball #1's final momentum
unknown #2: `y` component of ball #1's final momentum
unknown #3: `x` component of ball #2's final momentum
unknown #4: `y` component of ball #2's final momentum
equation #1: conservation of the total `p_x`
equation #2: conservation of the total `p_y`
equation #3: no decrease in total `KE`
Note that we do not count the balls' final kinetic energies as unknowns, because knowing the momentum vector, one can always find the velocity and thus the kinetic energy. The number of equations is less than the number of unknowns, so no unique result is guaranteed. This is what makes pool an interesting game. By aiming the cue ball to one side of the target ball you can have some control over the balls' speeds and directions of motion after the collision.
It is not possible, however, to choose any combination of final speeds and directions. For instance, a certain shot may give the correct direction of motion for the target ball, making it go into a pocket, but may also have the undesired side-effect of making the cue ball go in a pocket.
Calculations with the momentum vector
 The following example illustrates how a force is required to change the direction of the momentum vector, just as one would be required to change its magnitude.
The following example illustrates how a force is required to change the direction of the momentum vector, just as one would be required to change its magnitude.
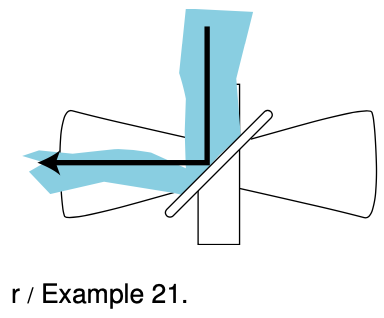
Example 21: A turbine
`=>` In a hydroelectric plant, water flowing over a dam drives a turbine, which runs a generator to make electric power. The figure shows a simplified physical model of the water hitting the turbine, in which it is assumed that the stream of water comes in at a 45° angle with respect to the turbine blade, and bounces off at a 90° angle at nearly the same speed. The water flows at a rate `R`, in units of kg/s, and the speed of the water is`v`. What are the magnitude and direction of the water's force on the turbine?
`=>` In a time interval `Deltat`, the mass of water that strikes the blade is `RDeltat`, and the magnitude of its initial momentum is `mv=vRDeltat`. The water's final momentum vector is of the same magnitude, but in the perpendicular direction. By Newton's third law, the water's force on the blade is equal and opposite to the blade's force on the water. Since the force is constant, we can use the equation
`F_"blade on water"=(Deltap_"water")/(Deltat)`.
Choosing the `x` axis to be to the right and the `y` axis to be up, this can be broken down into components as
`F_"blade on water",x=(Deltap_"water",x)/(Deltat)`
`=(-vRDeltat-0)/(Deltat)`
`=-vR`
and
`F_"blade on water",y=(Deltap_"water",y)/(Deltat)`
`=(0-(-vRDeltat))/(Deltat)`
`=vR.`
The water's force on the blade thus has components
`F_"water on blade",x=vR`
`F_"water on blade",y=-vR`.
In situations like this, it is always a good idea to check that the result makes sense physically. The `x` component of the water's force on the blade is positive, which is correct since we know the blade will be pushed to the right. The `y` component is negative, which also makes sense because the water must push the blade down. The magnitude of the water's force on the blade is
`|F_"water on blade"|=sqrt(2)vR`
and its direction is at a 45-degree angle down and to the right.
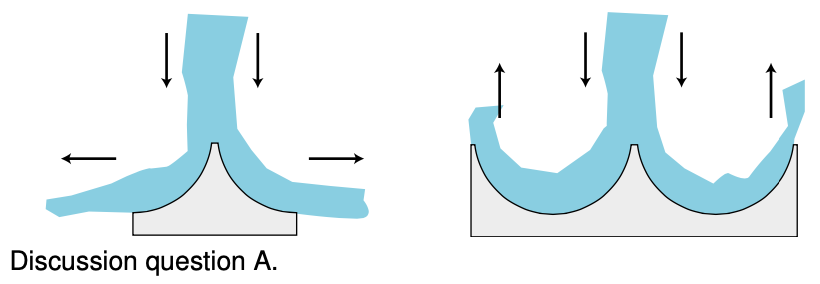
Discussion Questions
A The figures show a jet of water striking two different objects. How does the total downward force compare in the two cases? How could this fact be used to create a better waterwheel? (Such a waterwheel is known as a Pelton wheel.)
14.5 Momentum in three dimensions by Benjamin Crowell, Light and Matter licensed under the Creative Commons Attribution-ShareAlike license.