How to Use
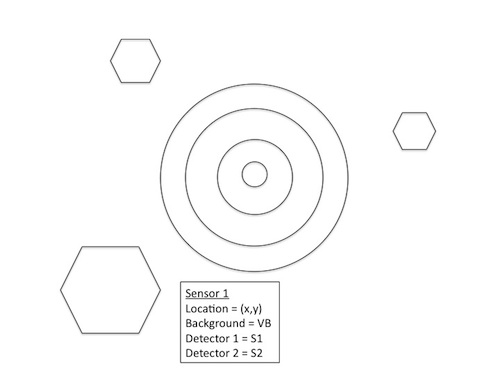
The x,y-coordinates refer to where each of the three sensors are located on a grid, with units measured in miles.
The sensor values are the readings that come off of the detectors on each sensor, highest first, then next highest.
The high and low locations refer to which side of the hexagonal sensor that the detector is on (0 meaning north and then moving clockwise through to 5).
The background voltages refer to the reading off of the detector when no event is happening to account for background noise.
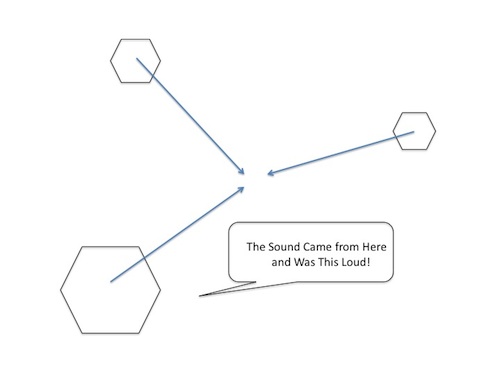
What is returned is a least squares estimate of the location of the initial sound event, as well as each sensor's relative estimate of the intensity of the event in decibels.
About the Project
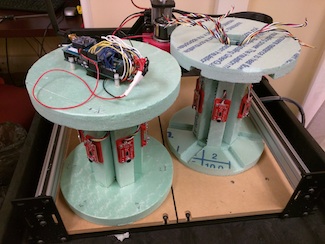
A project of GUBotDev is to create an affordable option to gunshot noise detection in urban areas.
Our approach is to use commercial sound detectors (We use the SparkFun Sound Detector) and arrange six of them onto a hexagonal frame making a larger sensor. We then arrange a number of these in an urban area and read off their envelope to get the sound level entering in. We read a voltage that can be used to determine the relative sound level of a certain event entering into each separate detector. Given a sound event entering into two adjacent sensors, we can use vector math to figure out the relative angle and magnitude of the sound entering the sensor. Now, if the sound event was powerful enough to reach at least three sensors, we are able to use a least squares approach to find the approximate intersection of the three lines of sound from the sensors. This gives us an approximate location for the source location of the sound event. The beauty of the least squares approach is that the errors in each individual measurements on the sensors due to background noise, will tend to cancel one another out. This source location can then be used on each sensor to tell an approximation of the original sound intensity, so that one may differentiate between the original sound event being something in the range of a gunshot or just a bicycle horn near one sensor.
This project attempts to simplify the need for a million dollar security system for a city, and hopes to give a reprieve for certain municipalities that may not be able to afford such a hefty price.
Potential problems with the approach described above is based on how sound may travel in extreme weather, be it clouded by snow, shifted by wind, or distorted by too much rain. Another is how to differentiate between two sound sources that have the same intensity at a point. Solutions on further work may attempt to used barometric equipment on each sensor to record weather conditions and adjust sensitivity as appropriate, and, for the other, to record how long the sound is read and differentiate based on sound duration for a given intensity.
To learn more about our work, or for future suggestions, feel free to contact us at GUBotDev.com